There are already existing tools such as SWarp and Drizzle being able to stack images, which can be taken in same or different epochs, into a single image. But these tools are not suitable in the case of Quad-Channel Telescope (QCT), which is designed to conduct four-color fast photometry of space debris, due to their relatively low speed, while the main scientific targets of QCT are space debris, whose apparent motion can be very fast.
To resolve this problem, we developed a method to match the real-time requirement of QCT observation, to co-add the images taken by the four different channels. The algorithm, basically a straightforward linear combination method, has the advantage of being able to handle the slight exposure-to-exposure differences of transformation, i.e. shifts and rotations, between the 4 channel’s images. Most importantly, the algorithm, with the CPU consumption of each co-adding calculation less than 100 ms on a 3.4 GHz CPU with 4 cores, is fast enough to support QCT’s observation of space debris.
By with PING YIding
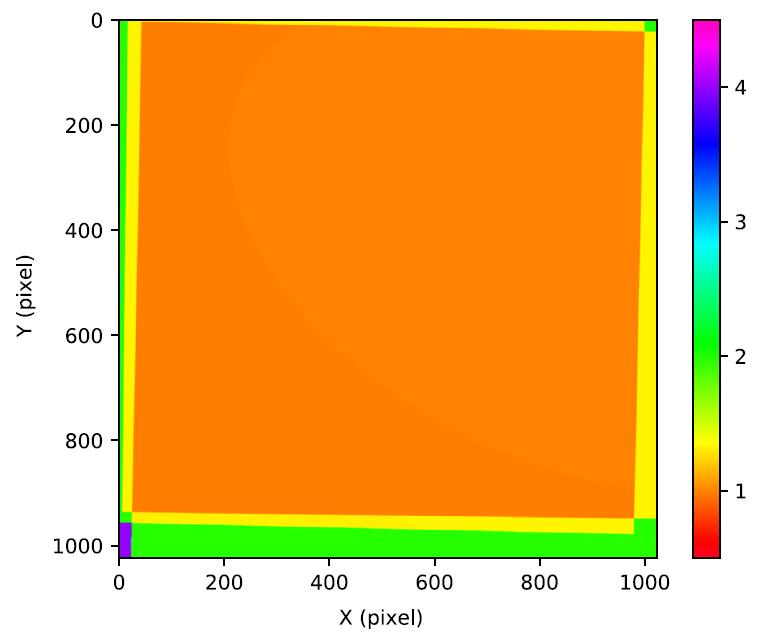
Fig. A typical weight map of co-adding. There are four obvious levels in different colors in the plot, representing the overlapping of 1, 2, 3 or 4 inputimages. The values of the orange part are very close to 1, thus almost no correction is to be done for these pixels. The values of purple part at the lower-left corner are very close to 4, which scale the values to the same level of other parts. The yellow and green part represents overlapping of 2 and 3 input images respectively. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
By comparison, we find that the standard deviations of the positions in co-added image from those in original images are about 0.2 pixels in both coordinates. The results of the our fast algorithm are very similar to, even slightly better than, those of SWarp in terms of the signal-to-noise ratio of the detections. But SWarp is not efficient enough to be embedded into a real-time observation system. Therefore our algorithm is obviously a better choice.
This work by Yiding Ping & Chen Zhang has been published in Advances in Space Research. Plese see 60 (2017 907-914 for more detail:
http://www.sciencedirect.com/science/article/pii/S0273117717303472?via%3Dihub
